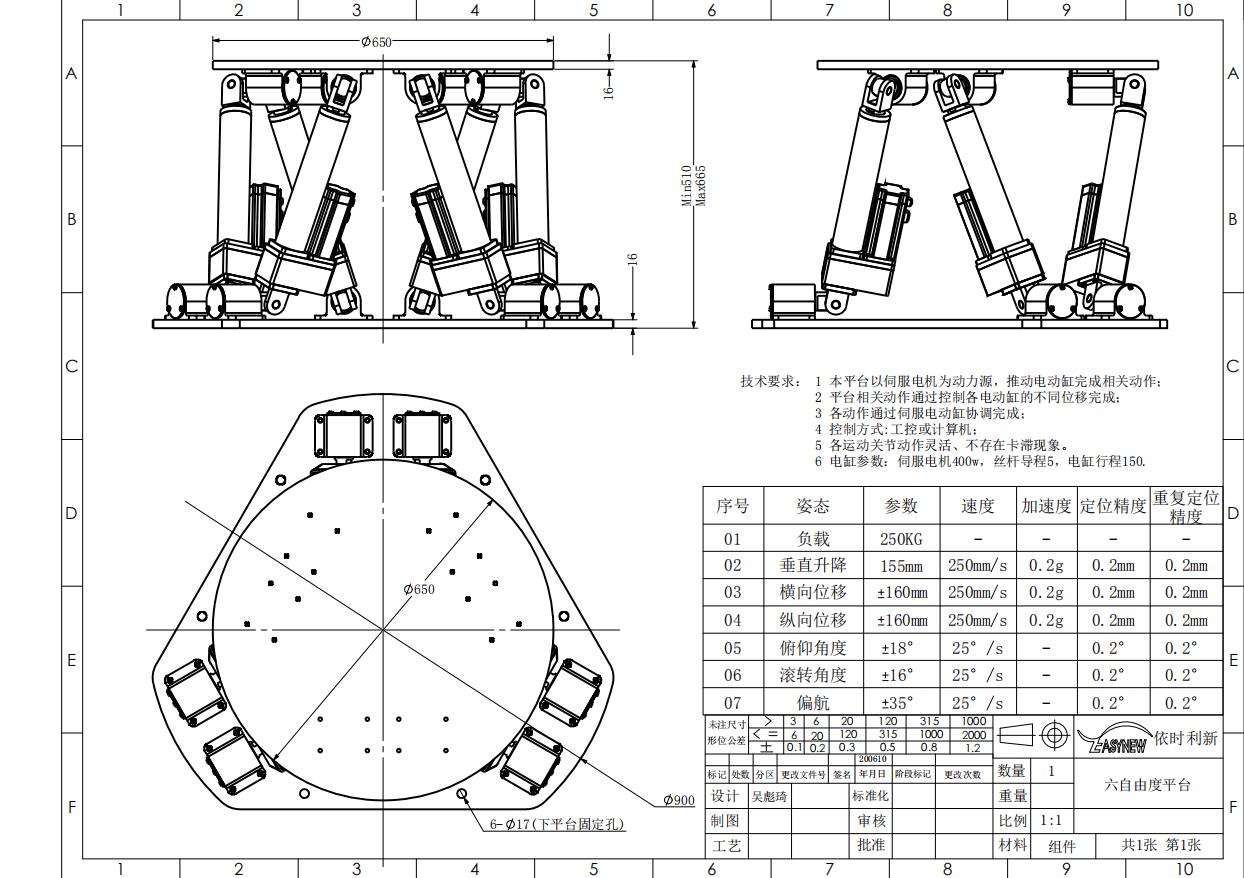
500*500*500mm小型六自由度平台负载200KG
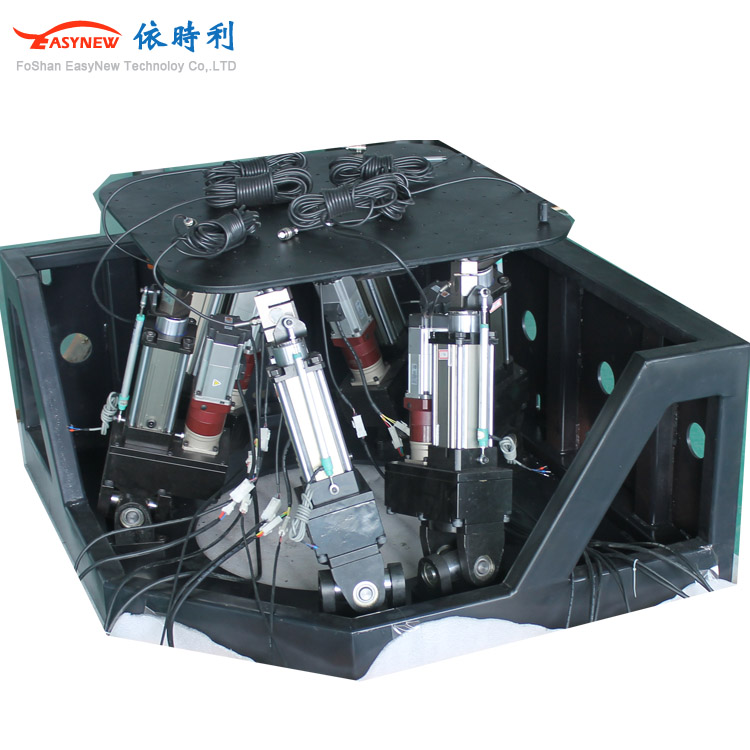
500*500*500mm小型六自由度平台负载200KG
六自由度机械伺服实验系统
1、功能概况
该系统有多个转动关节,连续轨迹型控制,机构由一点到另一点的准确定位,带有手腕和手指的工业系统并按教学科研的需求进行设计,可实现工作空间内任意位置工件的抓取和搬运。编程输入可将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到控制柜,编程系统为基本开放状态,使用者可以研究伺服电机的控制,反馈,应用算法等。
2、该系统具备以下技术要求
垂直多关节型
负载:2.0kg
带手指控制,可将电缆内置的中空手臂构造
移动机构重复定位精度:±0.1mm
变位机重复定位精度: ±0.1mm
机械臂参数:
输入电压: 交流220V 输出24V
各轴运动范围及功耗:
J1:300°(-150,+150) 140W左右 J2: 220°(-90,+130) 140W左右
J3:196°(-90,+106) 53W左右 J4: 320°(-160,+160) 36W左右
J5: 240°(-30,+210) 29W左右 J6: 310°(-155,+155) 26W左右
最大单轴速度: 5000°/min 最大合成速度: 5000mm/min
整机重量≥20kg 控制电机脉冲信号频率范围:1-2MHz
脉冲信号的最大电流:20mA 通用数字输入/输出口数量:16/16
外部电源输入:24VDC,10A
运动控制函数库:支持多种语言:VC、Delphi、VB6.0,LabVIEW等
3、该系统控制部分具备以下要求及软件仿真实验
3.1工业操作台技术基本理论演示软件
运动学的基础:齐次变换和位位姿矩阵、机器臂的运动方程及D-H表示法
运动方程的解:正解和逆解、机器臂动力学模型及建模方程
轨迹规划原理和基本方法
3.2实验教学工业操作台仿真软件
单步平移和旋转的齐次变换、多级坐标系间的齐次变换
三自由度平面关节机器臂运动方程的建立和仿真
实验台六自由度机器臂运动学建模和正解
实验台六自由度机器臂运动学建模和逆解
实验台六自由度机器臂动力学建模和仿真、规划轨迹的生成
3.3实验教学工业操作台实验操作控制软件
单臂运动控制实验、多臂协调运动控制实验、手腕位姿控制实验
关节轨迹的插值实验、实验台机器臂任意点抓取工件实验
实验台机器臂任意两点搬运工件实验
★3.4伺服电机控制反馈及应用算法和联动分析(注;重要参数,不满足无评标资格)
单个伺服电机的运动参数分析实验、多个伺服电机联合运动参数分析实验
伺服电机的控制、反馈、及运动参数分析实验
全部软件用LabVIEW编写,核心部分用VC++编写的动态链接库,便于用户学习研究和二次开发。根据用户需要,厂家可提供动态链接库相关函数的原代码。
4、技术手册
设备使用说明书,含设备总图及部件装配图、传动系统图及说明、设备操作规程、设备定期维护规程、设备定期检修规程、电气原理图、电气布置图、故障诊断说明。
伺服系统说明书,包括操作手册、编程手册、连接手册、伺服系统使用、维修手册、参数手册、报警信息文本。
程序传输软件及配件,实验指导说明书。